hari ii saya masuk robotik.ini pertemuan ke 10.hari ini saya belajar robot avoider.avoider berarti menghindar,yaitu robot yang bisa menghindari suatu benda yang menghalangi sensor/robot.avoider robot menggunakan sensor ultrasonic untuk menghindari benda.misalnya,robot didekatkan dengan tembok atau benda,lalu robot itu akan menghindarinya bisa dengan berbelok,mundur,dll.ada fersi ultrasonic dengan servo,jadi kalau ada benda yang menghalang,ultrasonic akan berputar 180 derajat ke kanan kiri untuk mencari jalan keluar dari halangan benda.
lengkapnya
Robot Avoider (atau robot penghindar halangan) adalah jenis robot otonom bergerak (mobile robot) yang dirancang khusus dengan kemampuan untuk mendeteksi rintangan atau objek di lingkungannya dan secara otomatis mengubah arah geraknya untuk menghindari tabrakan.
Fungsi dan Aplikasi
Fungsi utama robot avoider adalah navigasi mandiri di lingkungan yang tidak diketahui atau dinamis tanpa bantuan operator manusia. Aplikasi dari teknologi ini meliputi:
- Navigasi Umum: Digunakan dalam sistem navigasi robot bergerak secara umum.
- Pembersih Otomatis: Diterapkan pada robot penyedot debu otomatis untuk menavigasi ruangan dan menghindari furnitur atau dinding.
- Lingkungan Berbahaya: Dapat digunakan untuk penjelajahan di area yang terlalu berbahaya atau sulit dijangkau oleh manusia, seperti dalam misi pengintaian.
- Prototip Industri Otomotif: Konsepnya menjadi ide terapan untuk fitur keselamatan pada kendaraan bermotor, seperti sistem bantuan parkir otomatis atau penghindaran tabrakan.
- Edukasi dan Penelitian: Sering digunakan sebagai proyek dasar dalam pembelajaran robotika dan pemrograman mikrokontroler bagi pelajar dan mahasiswa.
Cara Kerja
Prinsip dasar robot avoider melibatkan tiga bagian utama:
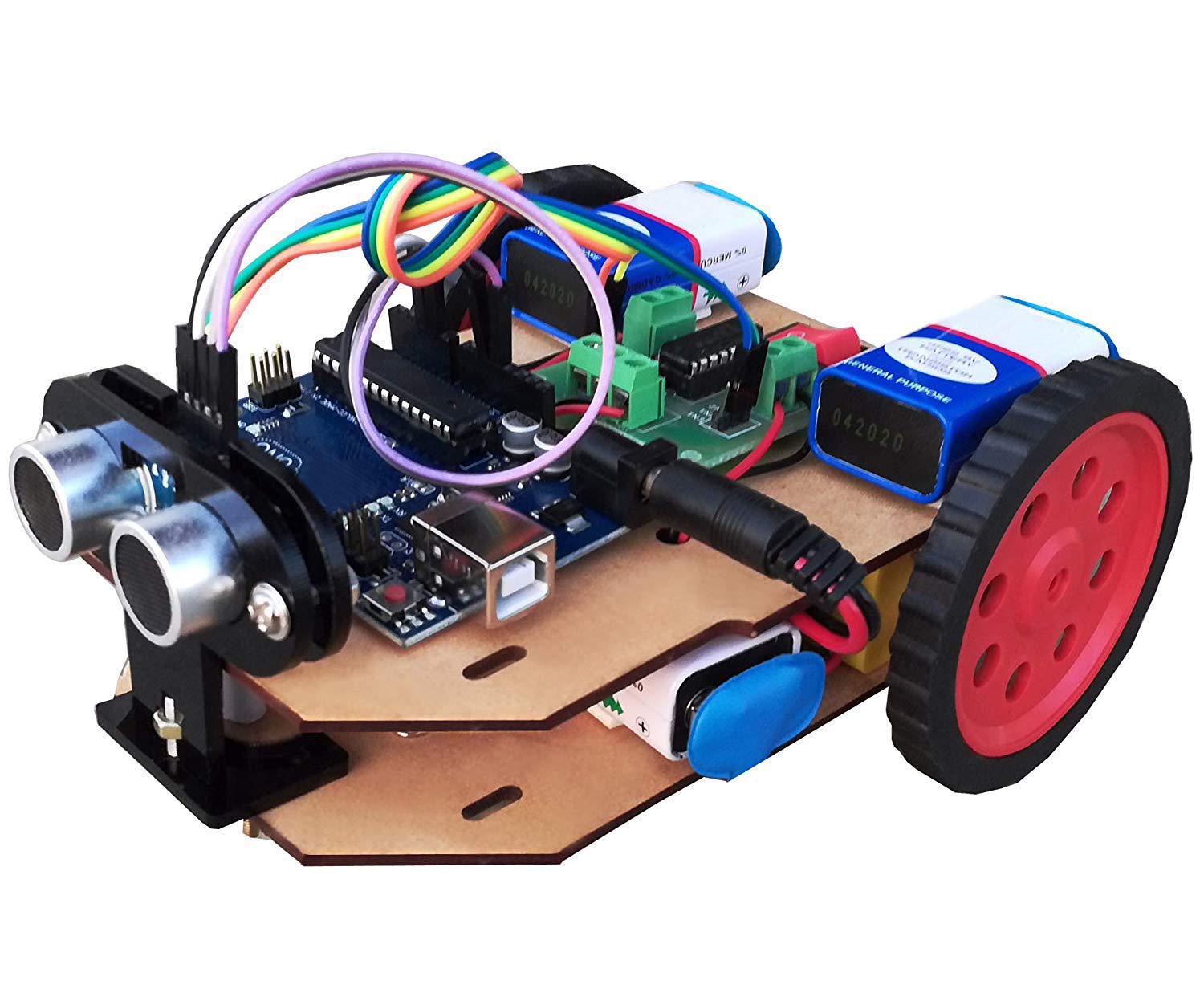
- Sensor (Input): Robot ini umumnya menggunakan sensor jarak, yang paling umum adalah sensor ultrasonik (seperti HC-SR04), untuk mendeteksi keberadaan, lokasi, dan jarak objek di sekitarnya. Beberapa desain juga menggunakan kombinasi sensor inframerah atau kamera.
- Mikrokontroler (Pengendali): Data dari sensor dikirim ke mikrokontroler (misalnya, Arduino Uno, ATmega8535), yang berfungsi sebagai “otak” robot. Mikrokontroler memproses data ini menggunakan algoritma penghindaran halangan.
- Aktuator (Output): Berdasarkan keputusan mikrokontroler, sinyal dikirim ke aktuator, biasanya motor DC, yang menggerakkan roda atau kaki robot untuk berbelok, berhenti, atau bergerak mundur, sehingga menghindari tabrakan dan melanjutkan perjalanan.
Secara sederhana, robot akan terus bergerak maju hingga sensor mendeteksi halangan dalam jarak tertentu. Ketika halangan terdeteksi, robot akan berhenti sejenak, memindai lingkungan (kanan atau kiri) untuk menemukan jalur yang bersih, dan kemudian berbelok ke arah yang tidak terhalang.
TERIMA KASIH
Leave a Reply